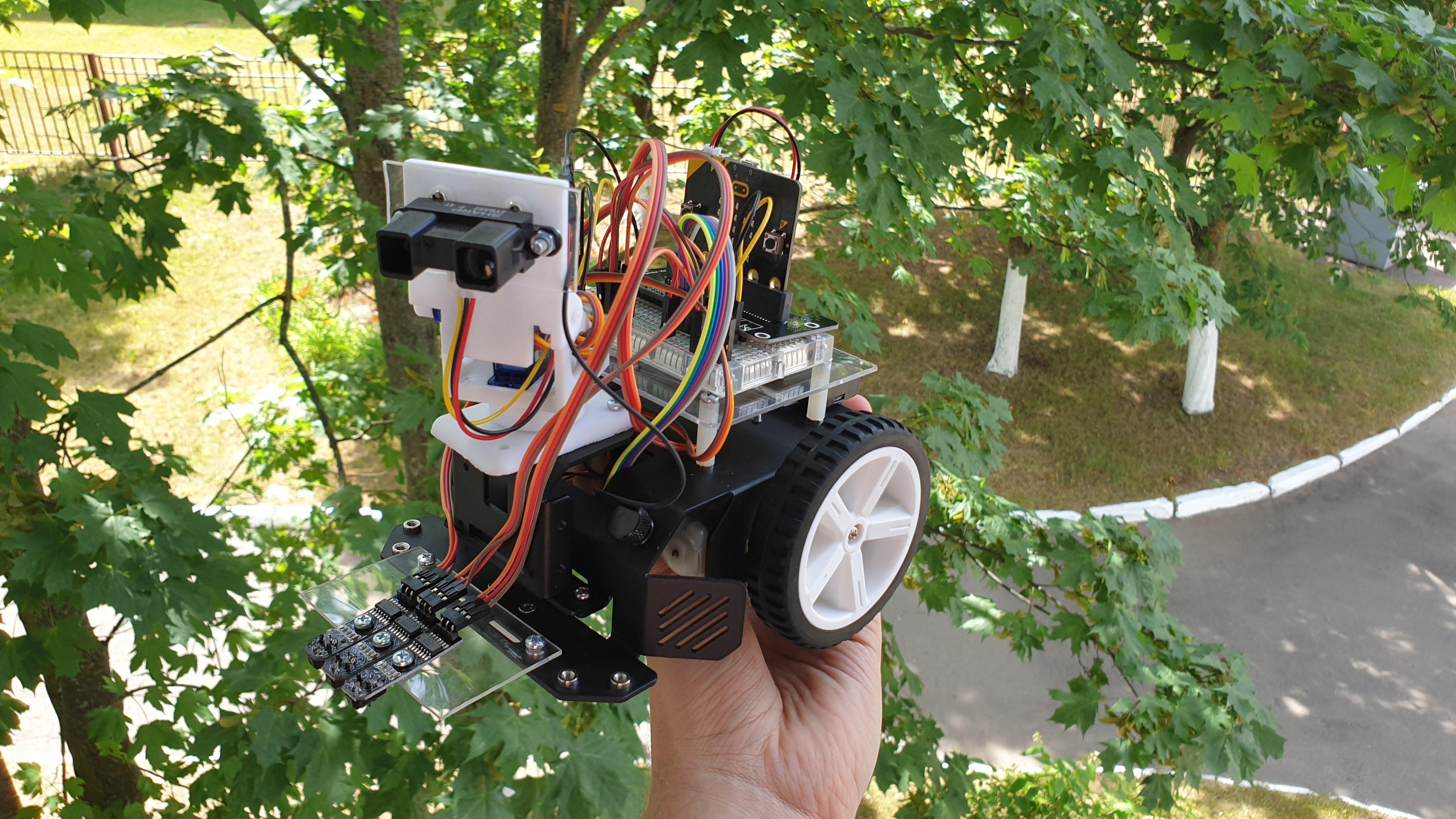
Робот на Микробит microbit (инструкция)
1 Введение
2 Комплектующие
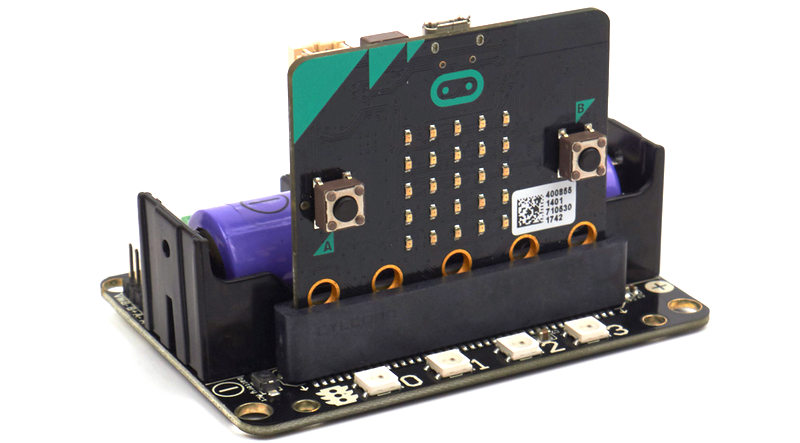
Некоторые элементы вы можете заказать в магазине МРобот по ссылкам:- Плата micro:bit
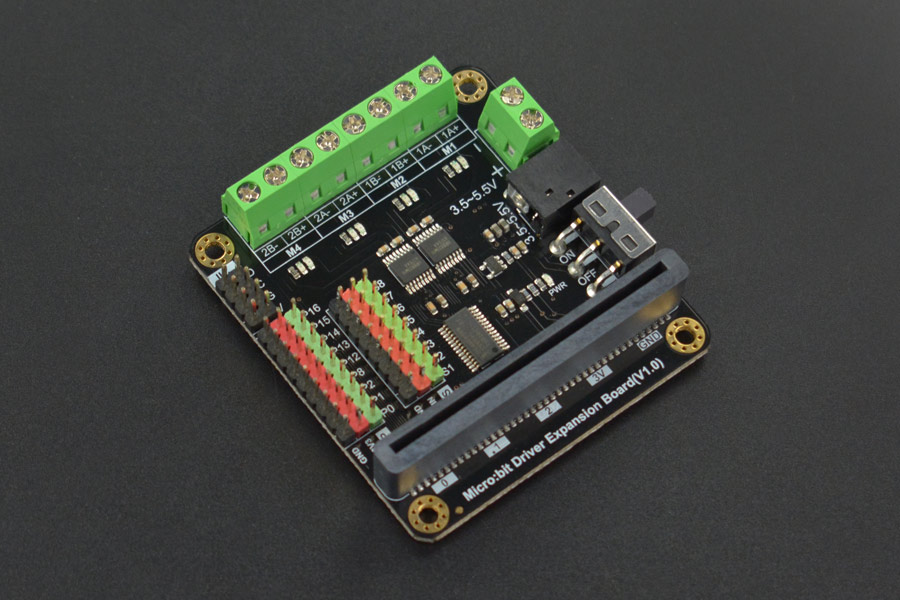
- Плата расширения Yahboom для micro:bit
- Цифровой датчик движения по линии TCRT5000 2 шт.
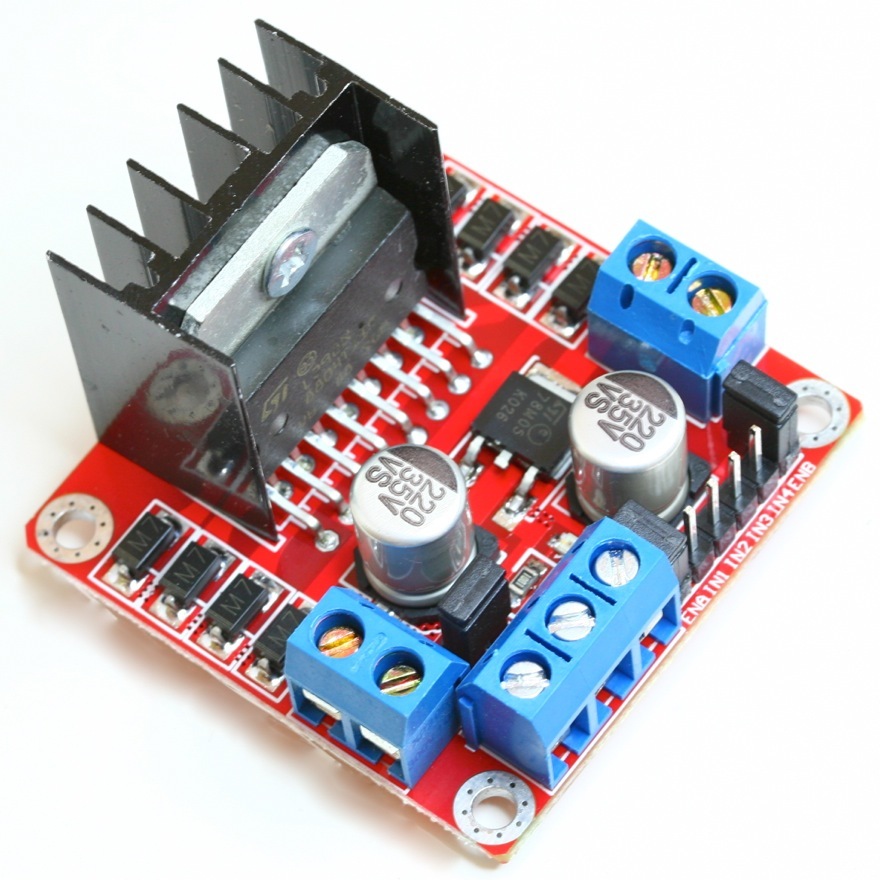
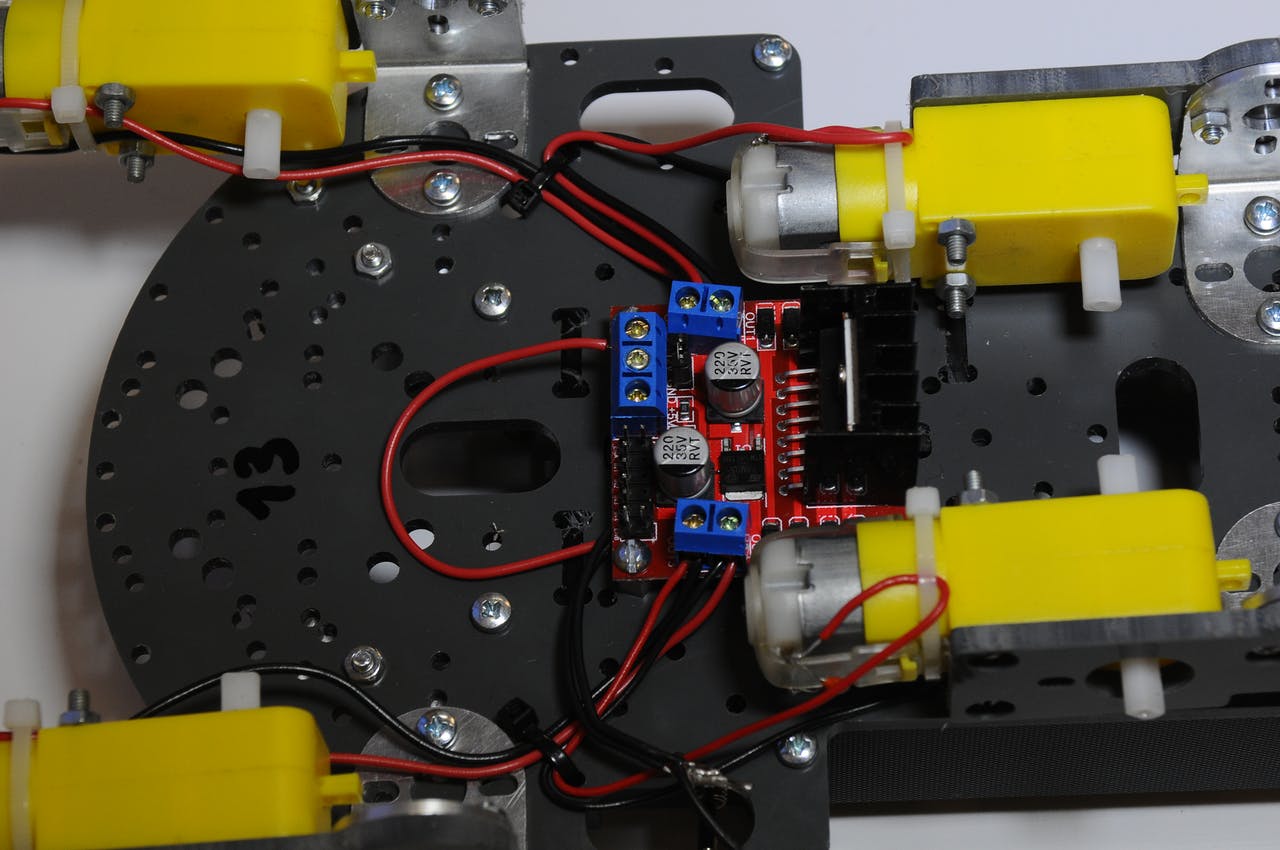
- Драйвер управления двигателями L298N
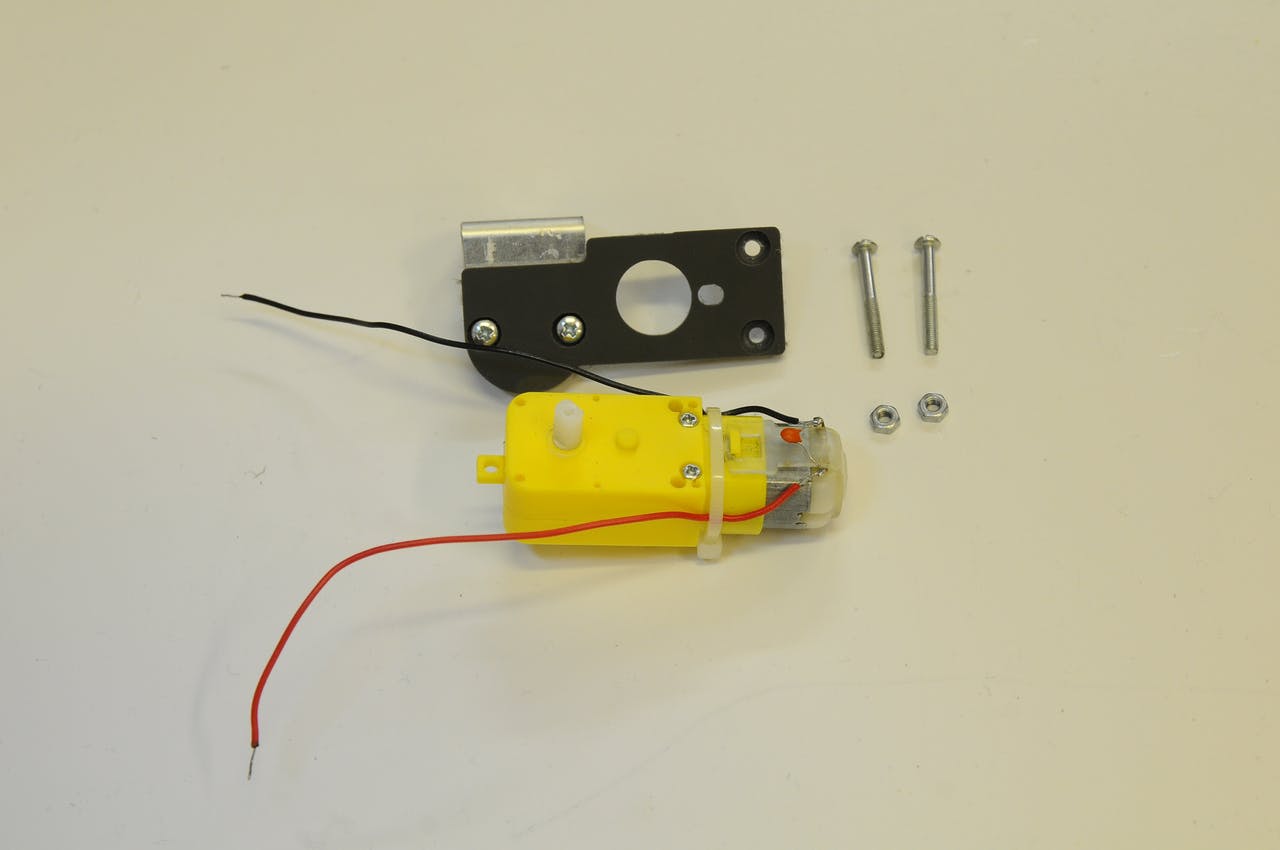
- Механизм Наклона-поворота (Pan-Tilt), для проекта понадобится только механизм поворота
- Инфракрасный дальномер (датчик расстояния) Sharp GP2Y0A0YK0F
- Платформа-шасси робота. В проекте использована двухколесная платформа, но вы можете использовать любую подходящую на ваш взгляд платформу
- Макетная плата на 400 точек
- 2ААА батарейный отсек
- 2S Li-Po аккумулятор 7.4В или 4АА/5АА батарейный отсек с батарейками
- Двухпозиционный переключатель
- Провод папа-мама 30см 20 шт.
- Провод мама-мама 30см 10 шт.
3 Программное обеспечение
4 Инструменты для сборки
5 Сборка робота
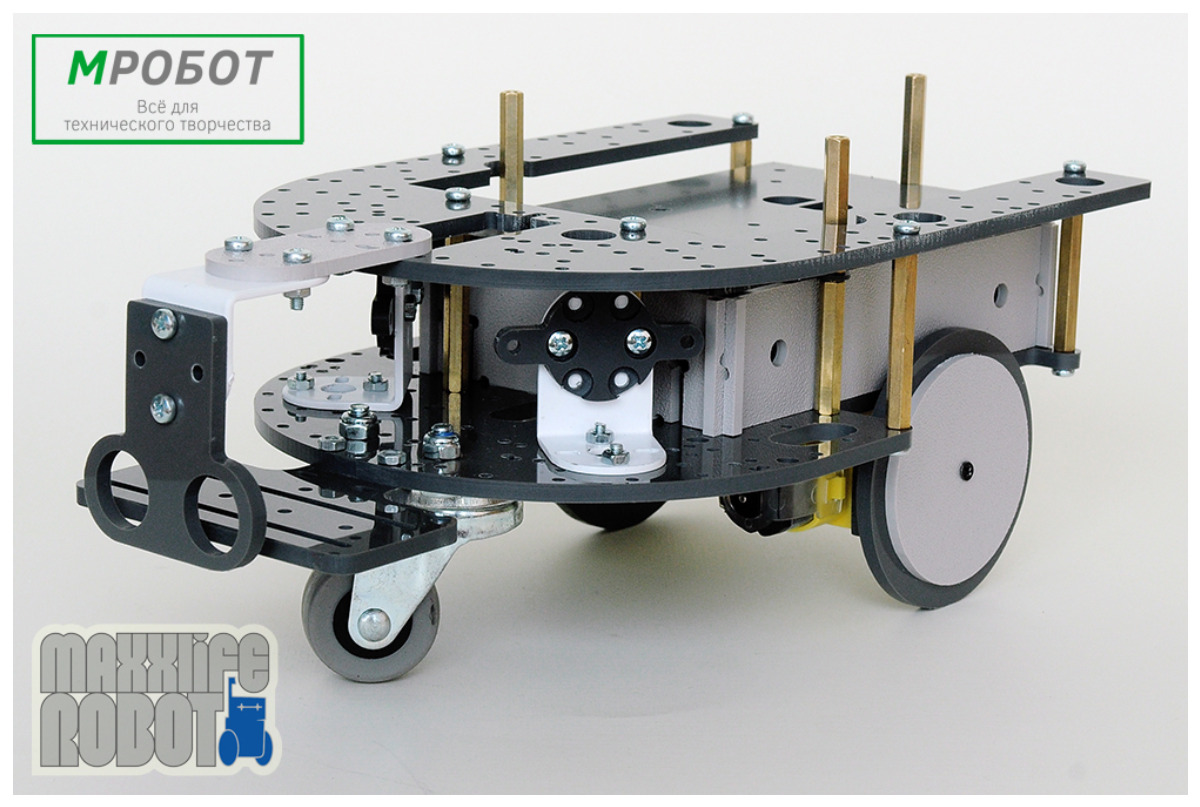
5.1 Шасси
 |
 |
 |
 |
Сегодня на рынке существует бесчисленное множество шасси роботов на разных вкус и разный размер кошелька.
5.2 Драйвер управления двигателями
 |
 |
5.3 Питание для электродвигателей
 |
 |


5.4 Питание для micro:bit
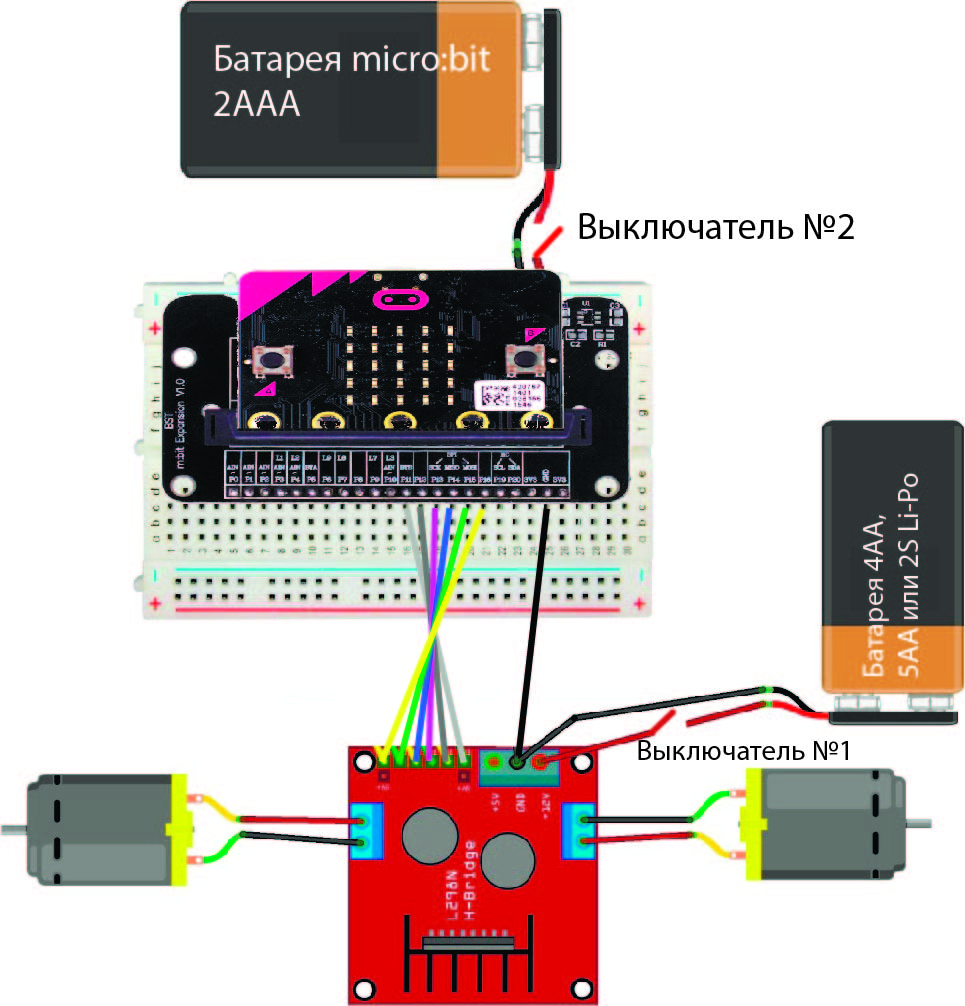
Питание платы не должно превышать 3.3В. Наилучший вариант -это 2 ААА батарейки в специальном блоке с разъемом для платы micro:bit.
Вот таким образом происходит подключение к micro:bit.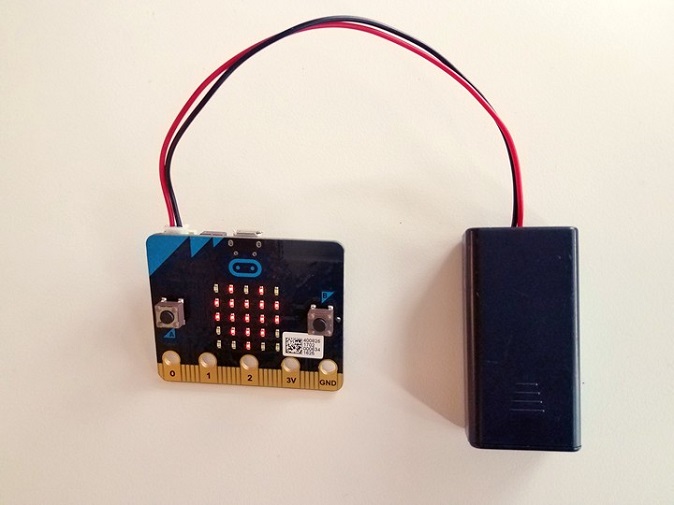
5.5 Выключатель
Чтобы батарею для моторов было удобно включать и выключать в цепь надо установить выключатель. В прошлом я сделал одну универсальную проводку для батареи и его включения к мотордрайверу.
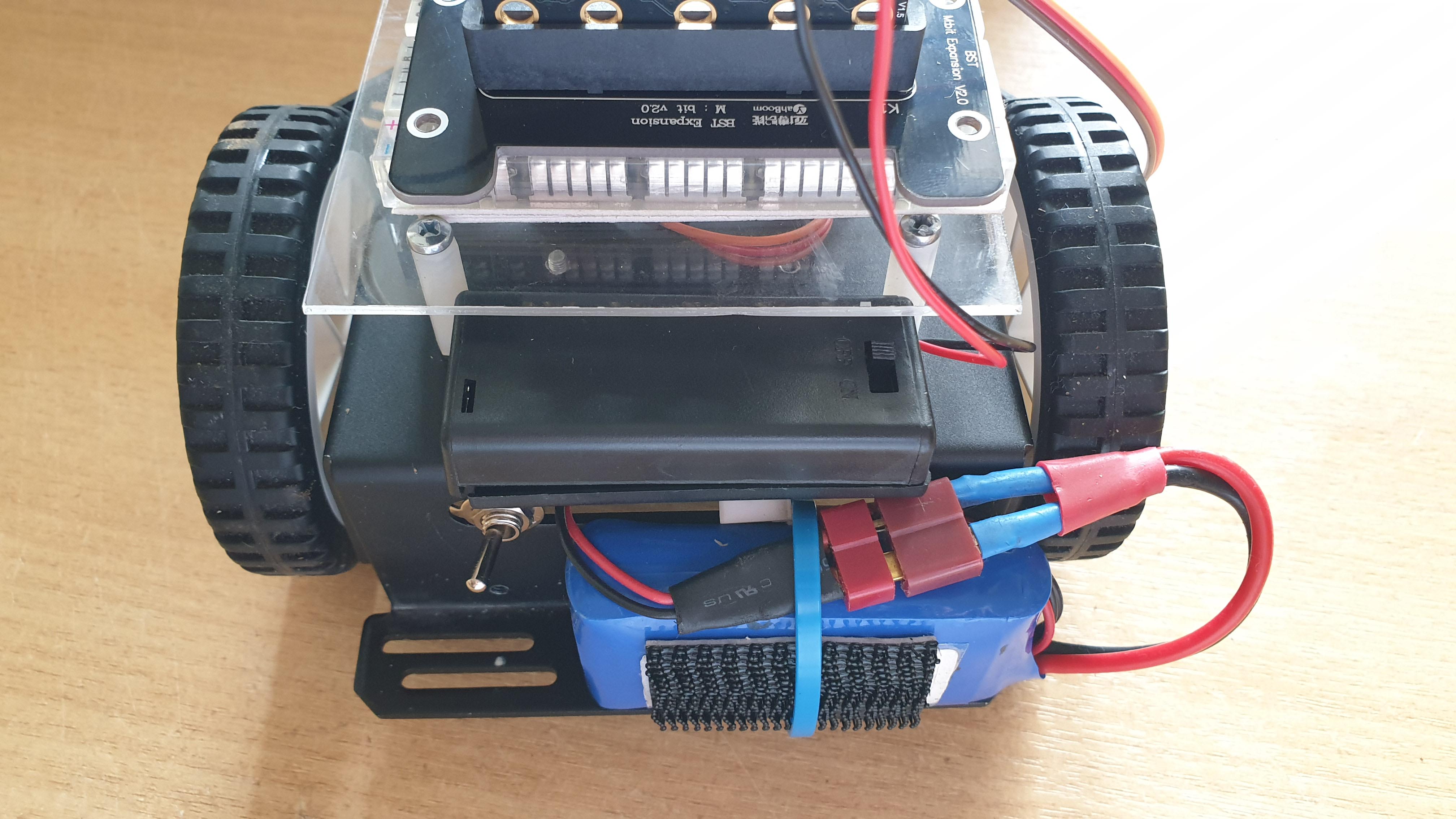
Синий переключатель размыкает + батареи, красный провод от него идет к выводу +12V на мотордрайвере. Красный разъем -это коннектор для батареи, черный провод от него идет к выводу GND на мотордрайвере. Черный штекер не используется, он был создан, чтобы запитывать плату Ардуино от аккумулятора.
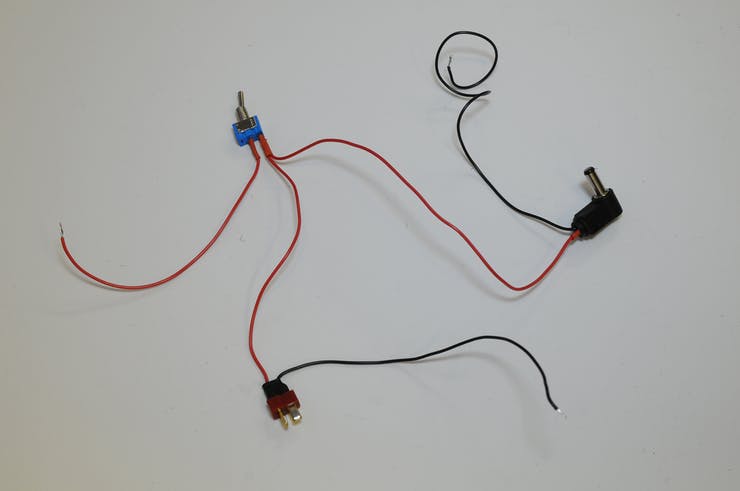
Моя стандартная проводка для роботов-машинок
Красный разъем называется T-Plug для подключения аккумулятора. Разные батареи имеют разные разъемы, я во всех роботах использую одинаковые разъемы, что обеспечить унифицированность проектов. Если батарея разрядилась, то можно отсоединить старую и подключить новую.
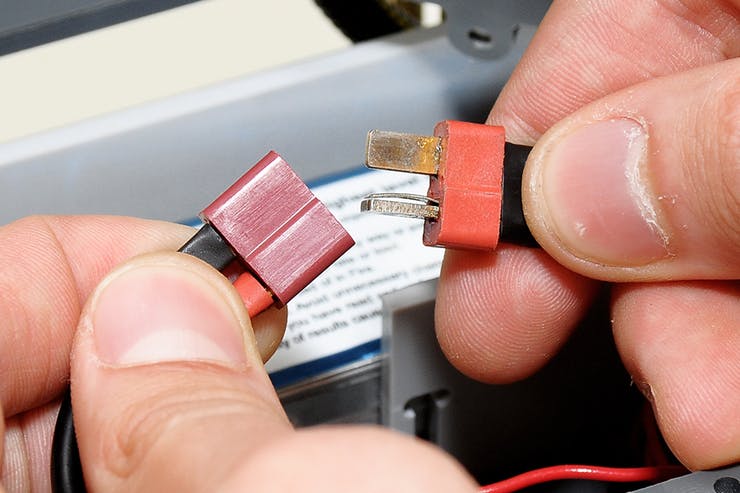
Слева коннектор от аккумулятора (мама), справа коннектор от проводки робота (папа)
5.6 Схема подключения компонентов micro:bit-Мотордрайвер-Моторы-Батареи
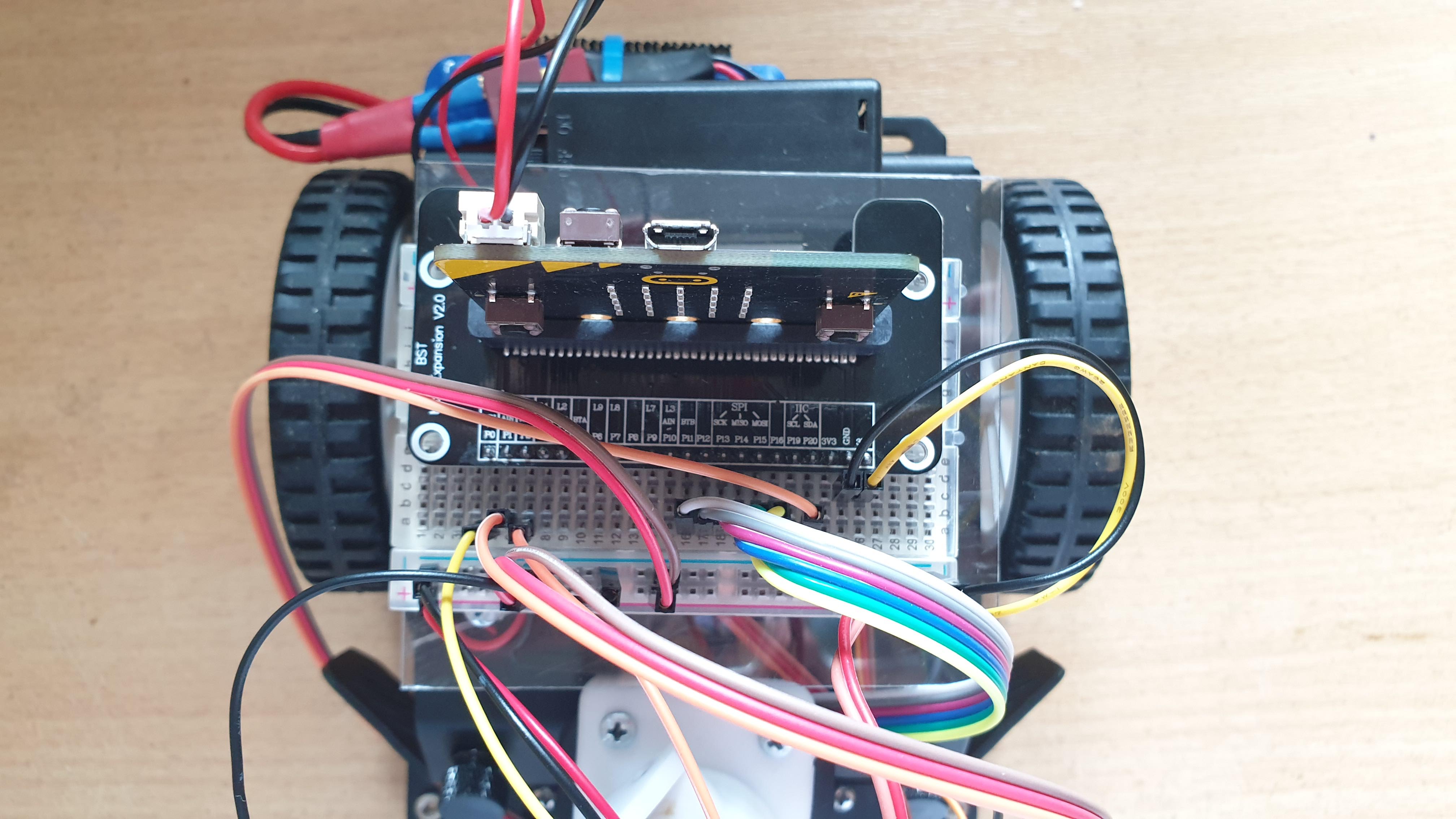
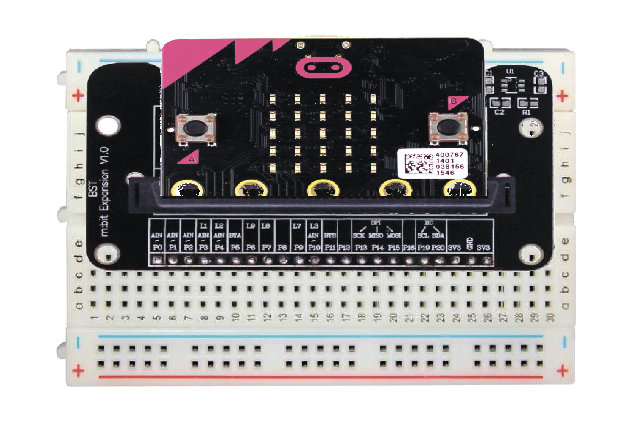 На плате расширения вы можете увидеть, что каждый вывод подписан (не путайте выводы с макетной платой белого цвета). Для управления мотордрайвером нам понадобятся выводы P11, P12, P13, P14, P15, P16. Выводы P11, P16 задействуют ШИМ и будут использоваться для управления скоростью вращения электродвигателей, остальные будут находится в состоянии логический 0 или логическая 1, чтобы определять направление вращения каждого из электродвигателей.
На плате расширения вы можете увидеть, что каждый вывод подписан (не путайте выводы с макетной платой белого цвета). Для управления мотордрайвером нам понадобятся выводы P11, P12, P13, P14, P15, P16. Выводы P11, P16 задействуют ШИМ и будут использоваться для управления скоростью вращения электродвигателей, остальные будут находится в состоянии логический 0 или логическая 1, чтобы определять направление вращения каждого из электродвигателей.
5.7 Схема подключения датчиков линии
Возьмите 2 цифровых датчиков линии TCRT5000. Датчик является бинарным. Когда датчик находится над темной поверхностью, он выдает значение логической единицы, а когда над светлой поверхностью, то значение логического ноля.

Цифровой датчик линии TCRT5000
Используя провода папа-мама подключите датчики к макетной плате согласно схеме приведенной ниже. Также возьмите два провода папа-папа и подключите к гнездам 3.3V и GND, после этого подключите их к шинам + и - на макетной плате соответственно. Это расширит количество выводов для подключения питания к датчикам и другим модулям.
Левый датчик OUT ->P1 VCC(красный провод) ->3.3V GND (черный провод) ->GND
Правый датчик OUT ->P20 VCC(красный провод) ->3.3V GND (черный провод) ->GND
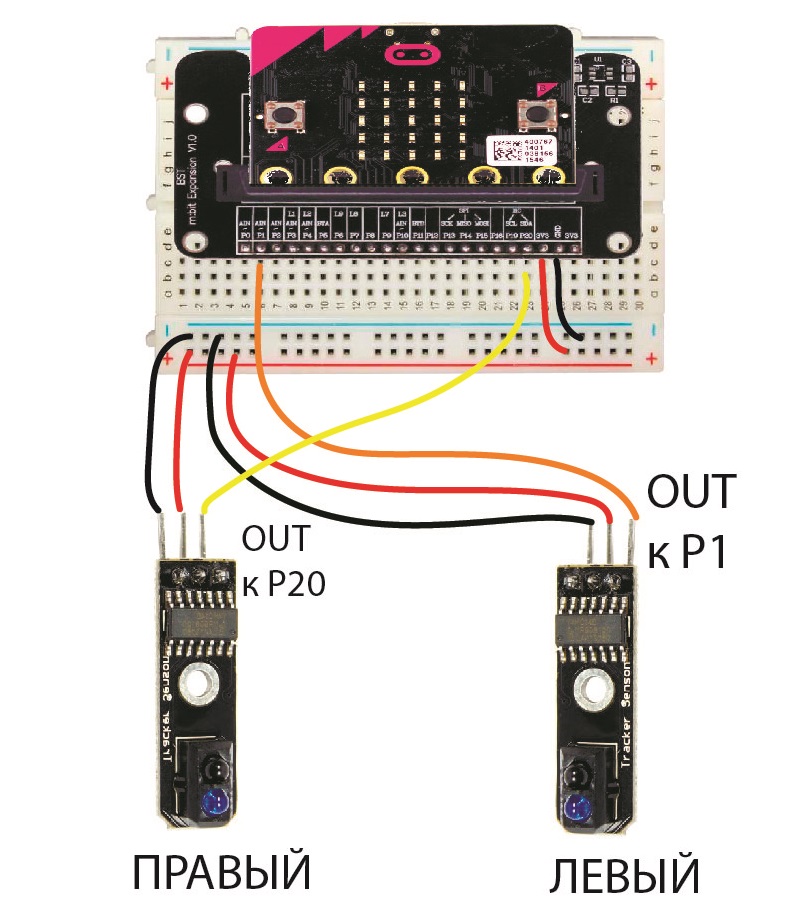
Схема подключения датчиков линии на роботе
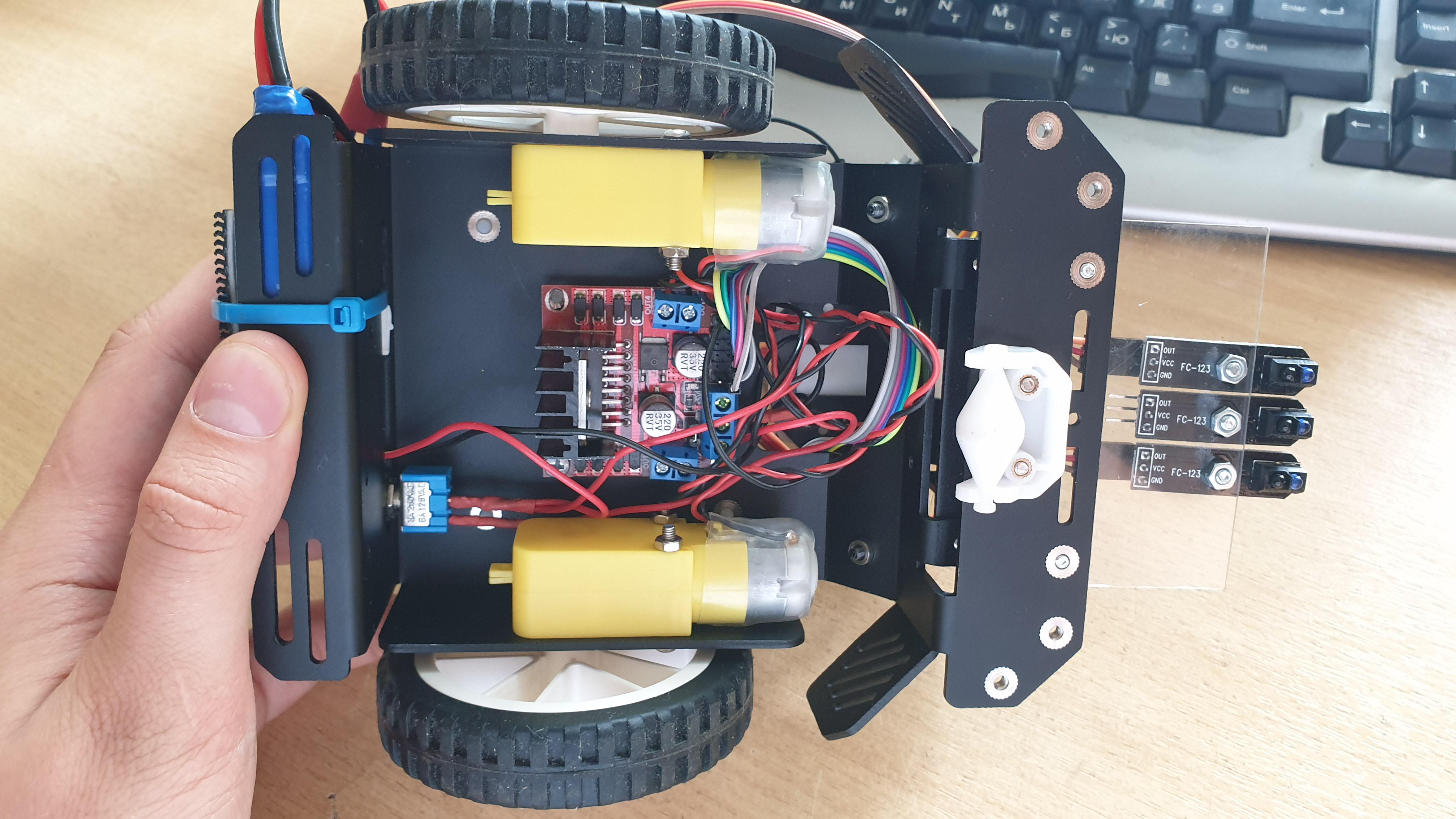
Следует заметить, что данные датчики имеют особенность сбоить, когда расположены слишком близко к друг другу. Например, на моей фотографии ниже показано, что робот имеет 3 датчика, но добиться нормальной работы, когда датчики так близко друг другу, не удалось. Поэтому было решено выключить центральный датчик и написать алгоритм под 2 датчика линии. Когда вы монтируете датчики, обеспечьте расстояние между краями печатных плат датчиков 5-10мм.
5.8 Схема подключения датчиков расстояния
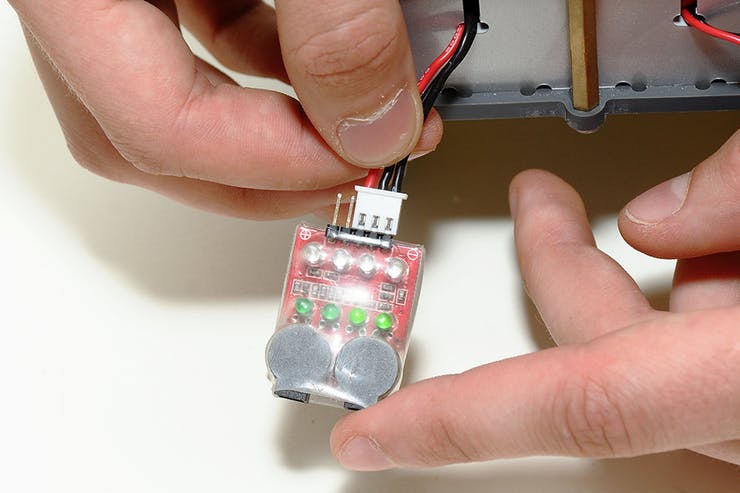
Теперь настало время подключать инфрарасный дальномер Sharp. Такой сенсор выдает аналоговое значение напряжения в зависимости от измеренного расстояния. Более подробную техическую информацию вы можете прочитать по ссылке: https://www.pololu.com/file/0J156/gp2y0a02yk_e.pdf
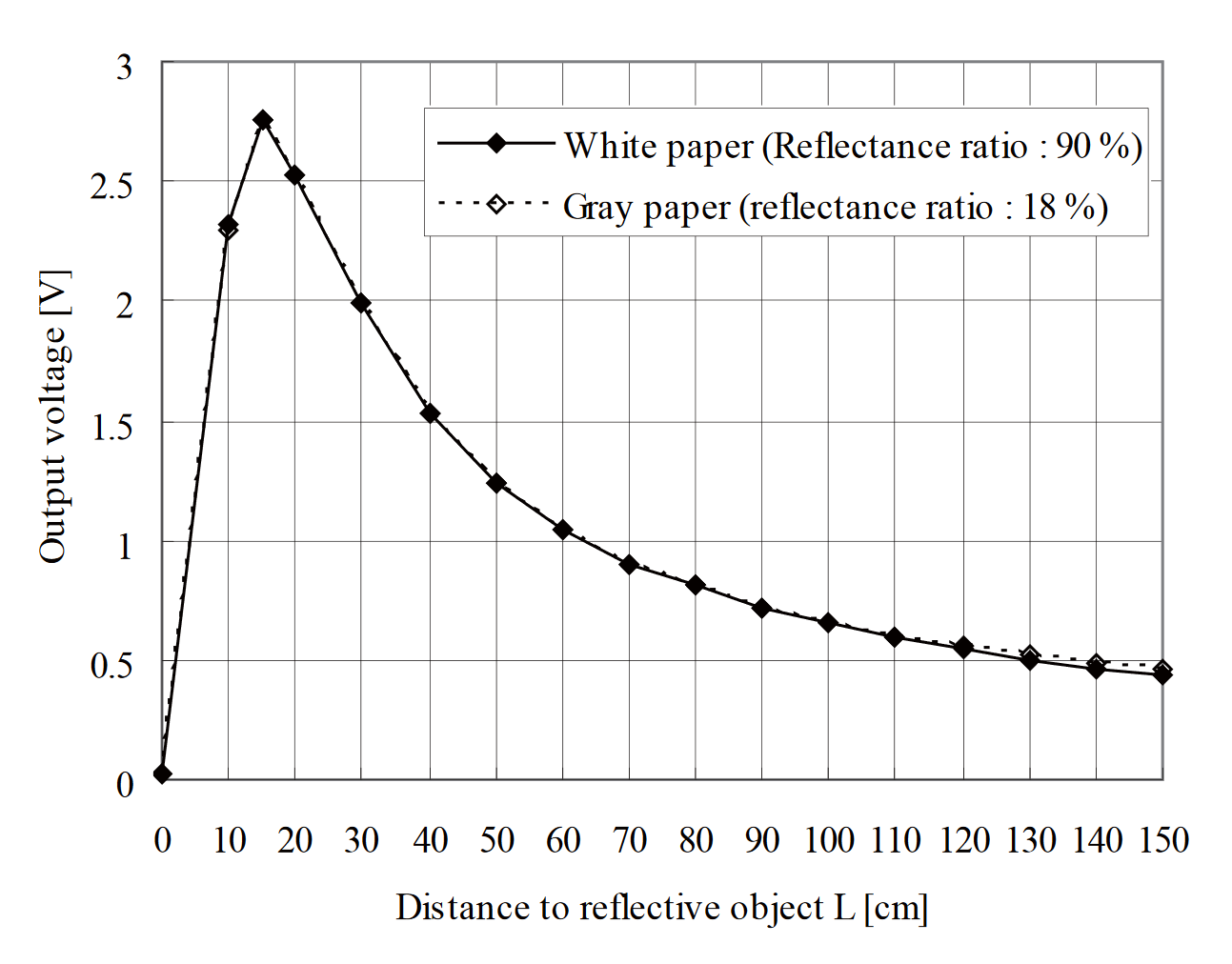 Зависимость выдаваемого напряжения от расстояния
Зависимость выдаваемого напряжения от расстояния
Обычный провод, который поставляется к этому сенсору не имеет специальных выводов, поэтому вам надо либо припаять к нему готовые провода со штырьками либо обжать провода, используя металлические штекеры.
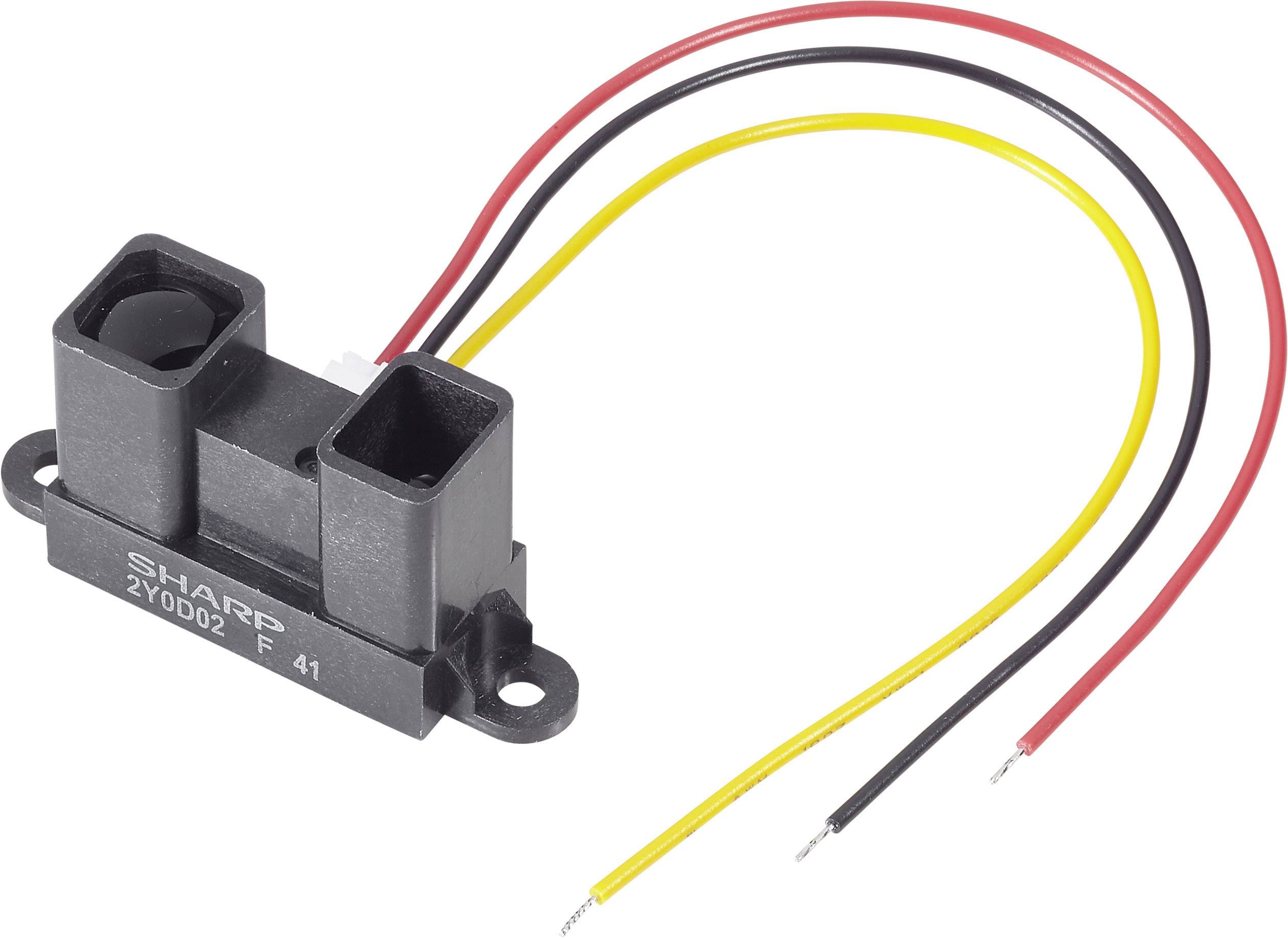
Датчик с подключенным к нему проводом
Первый вариант -это взять готовый провод, разрезать его и припаять к проводу датчика
 Второй вариант -это взять разъемы-штырки и обжать их вокруг провода
Второй вариант -это взять разъемы-штырки и обжать их вокруг провода
Когда вы подготовили провод, можно приступать к подключению согласно схеме.
OUT (желтый) ->P0 VCC(красный) ->3.3V GND (черный) -> GND
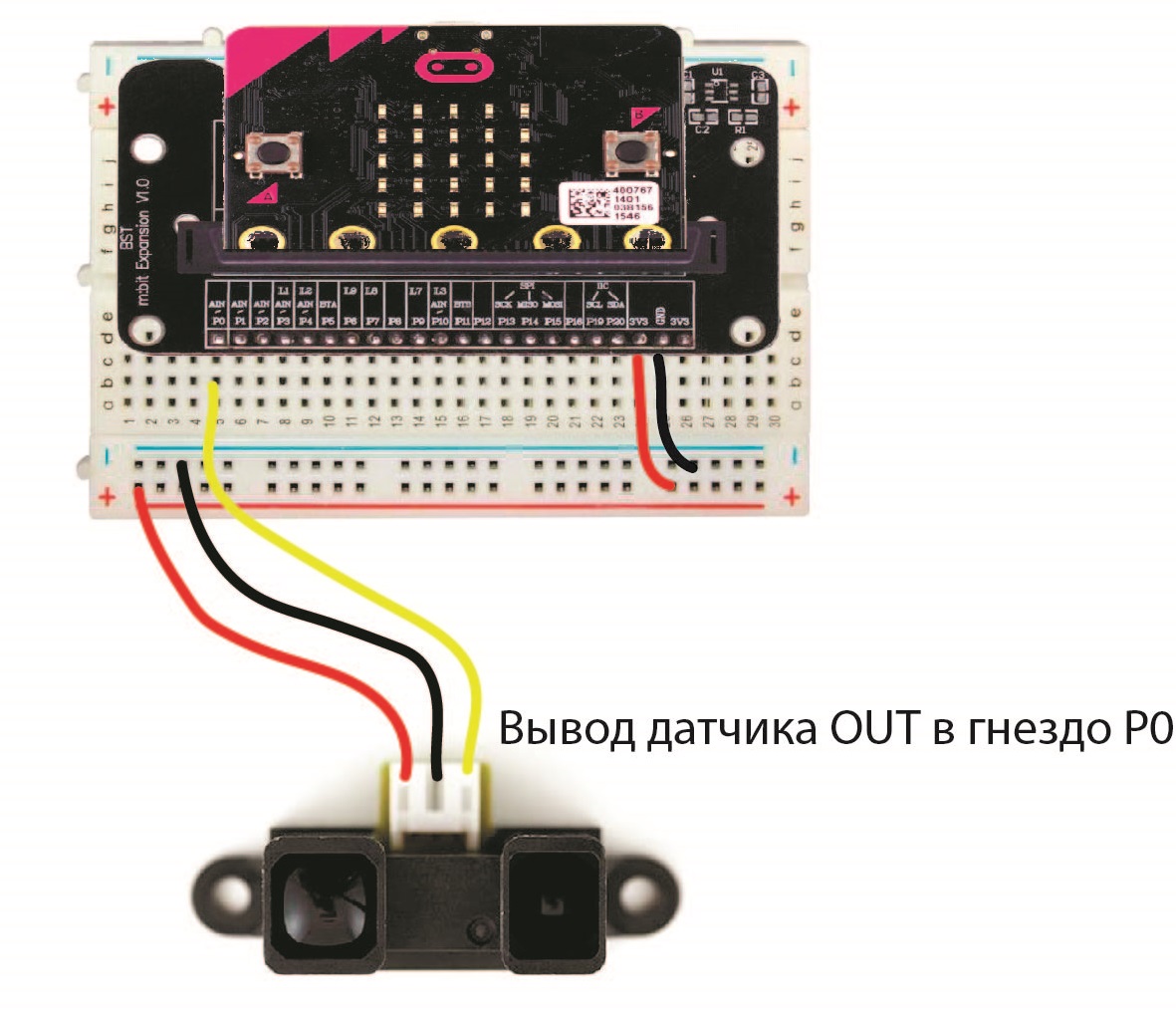 Схема подключения датчика расстояния
Схема подключения датчика расстояния
5.9 Схема подключения механизма Наклона-поворота
Такой механизм понадобится, чтобы поворачивать датчик расстояния и измерять расстояние в разных местах, после этого робот может принять решение в какую сторону ему двигаться.
Я использую для своего проекта механизм Наклона-поворота напечатанный 3Д-принтером (файла исходного у меня нет). Вы можете также спроектировать и распечатать свой или же купить пластиковый механизм для маленьких сервоприводов 9G (SG90). Такие сервоприводы потребляют небольшое количество электроэнергии и поэтому становится возможным питать их напрямую от платы micro:bit без дополнительного питания.
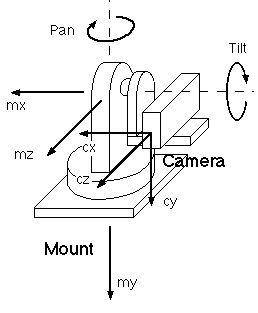
Схема типового механизма наклона-поворота
В нашем проекте будет использоваться лишь одна поворотная составляющая, чтобы поворачивать датчик. Механизм наклона использоваться не будет и сервопривод отвечающий за наклон будет выключен, но вы можете его включить и добавить в программу.
 Пластиковый механизм наклона-поворота для любительской робототехники
Пластиковый механизм наклона-поворота для любительской робототехники
Используя провода папа-папа подключите сервопривод поворота в горизонтальной плоскости к определенным гнездам на печатной плате.
OUT (оранжевый провод) -> P2 VCC (красный) ->3.3V GND (коричневый) ->GND
 Схема подключения сервопривода
Схема подключения сервопривода
5.10 Проверка подключений и сборки робота
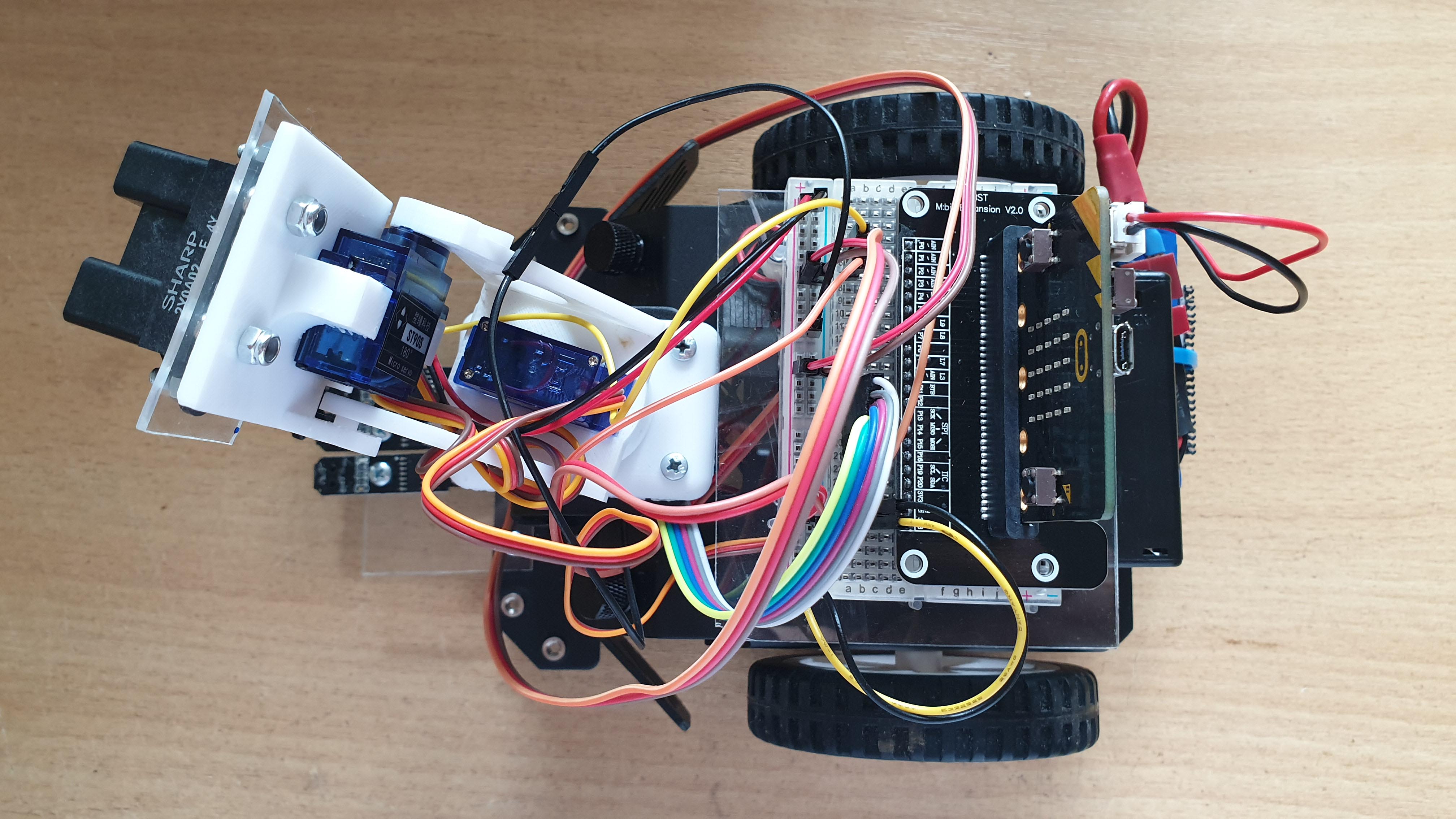
Вполне возможно, что ваш робот будет отличаться от того робота, который был собран мной. Поэтому доработайте свою конструкцию, ориентируясь на моего робота.
 |
|
 |
 |
6 Программирование
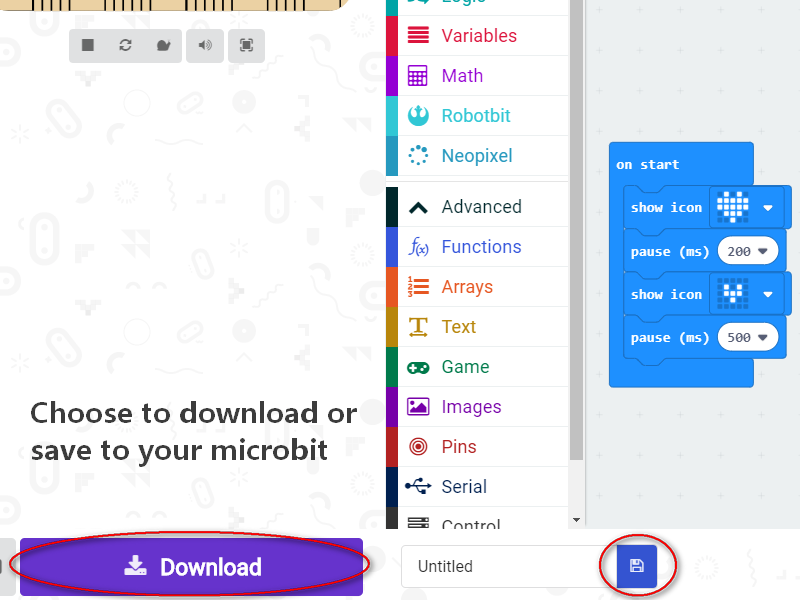
Скачайте код с блоками для графической среды MakeCode Скачать (скачайте и распакуйте архив)
Также можно скачать код, нажав маленькую ссылку Download под этим окном.
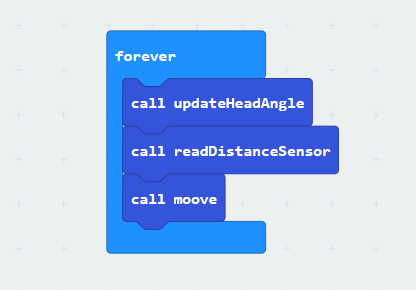
6.1 Программа по огибанию препятствий при помощи датчика расстояния
6.2 Программа движения по черной линии
Теперь надо удалить 3 блока из блока "forever" и поставить новый блок "call lineFollow". Он находится на рабочей области, перетяните его и вставьте в блок "forever".
Скачайте программу нажав на большую фиолетовую кнопку Download и сохраните файл на micro:bit. Включите робота и моторы.
Видео того, как робот начнет двигаться: